@inproceedings{jung2025uncertainty,title={Uncertainty-Aware Visual-Inertial SLAM with Volumetric Occupancy Mapping},author={Jung, Jae Hyung and Boche, Simon and Barbas Laina, Sebastián and Leutenegger, Stefan},booktitle={2025 IEEE International Conference on Robotics and Automation (ICRA)},pages={},year={2025},organization={IEEE},}
OKVIS2-X: Open Keyframe-based Visual-Inertial SLAM Configurable with Dense Depth or LiDAR, and GNSS
@inproceedings{boeche2025okvis2x,title={OKVIS2-X: Open Keyframe-based Visual-Inertial SLAM Configurable with Dense Depth or LiDAR, and GNSS},author={Boche, Simon and Jung, Jaehyung and Barbas Laina, Sebastián and Leutenegger, Stefan},booktitle={IEEE Transactions on Robotics},pages={},year={2025},organization={IEEE},}
2023
Fusion of Events and Frames using 8-DOF Warping Model for Robust Feature Tracking
Min Seok Lee, Ye Jun Kim, Jae Hyung Jung, and 1 more author
In 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023
@inproceedings{lee2023fusion,title={Fusion of Events and Frames using 8-DOF Warping Model for Robust Feature Tracking},author={Lee, Min Seok and Kim, Ye Jun and Jung, Jae Hyung and Park, Chan Gook},booktitle={2023 IEEE International Conference on Robotics and Automation (ICRA)},pages={834--840},year={2023},organization={IEEE},}
A Framework for Visual-Inertial Object-Level Simultaneous Localization and Mapping
@inproceedings{jung2023framework,title={A Framework for Visual-Inertial Object-Level Simultaneous Localization and Mapping},author={Jung, Jae Hyung and Park, Chan Gook},booktitle={2023 IEEE/ION Position, Location and Navigation Symposium (PLANS)},pages={1335--1340},year={2023},organization={IEEE},}
2022
Gaussian Mixture Midway-Merge for Object SLAM With Pose Ambiguity
@article{jung2022gaussian,title={Gaussian Mixture Midway-Merge for Object SLAM With Pose Ambiguity},author={Jung, Jae Hyung and Park, Chan Gook},journal={IEEE Robotics and Automation Letters},volume={8},number={1},pages={400--407},year={2022},publisher={IEEE},}
Photometric visual-inertial navigation with uncertainty-aware ensembles
@article{jung2022photometric,title={Photometric visual-inertial navigation with uncertainty-aware ensembles},author={Jung, Jae Hyung and Choe, Yeongkwon and Park, Chan Gook},journal={IEEE Transactions on Robotics},volume={38},number={4},pages={2039--2052},year={2022},publisher={IEEE},}
Object-based visual-inertial navigation system on matrix lie group
@inproceedings{jung2022object,title={Object-based visual-inertial navigation system on matrix lie group},author={Jung, Jae Hyung and Park, Chan Gook},booktitle={2022 International Conference on Robotics and Automation (ICRA)},pages={9499--9505},year={2022},organization={IEEE},}
Ensemble Kalman Filter Based LiDAR Odometry for Skewed Point Clouds Using Scan Slicing
@inproceedings{choe2022ensemble,title={Ensemble Kalman Filter Based LiDAR Odometry for Skewed Point Clouds Using Scan Slicing},author={Choe, Yeongkwon and Jung, Jae Hyung and Park, Chan Gook},booktitle={2022 International Conference on Robotics and Automation (ICRA)},pages={3677--3683},year={2022},organization={IEEE},}
2020
Constrained filtering-based fusion of images, events, and inertial measurements for pose estimation
@inproceedings{jung2020constrained,title={Constrained filtering-based fusion of images, events, and inertial measurements for pose estimation},author={Jung, Jae Hyung and Park, Chan Gook},booktitle={2020 IEEE International Conference on Robotics and Automation (ICRA)},pages={644--650},year={2020},organization={IEEE},}
Observability analysis of IMU intrinsic parameters in stereo visual–inertial odometry
@article{jung2020observability,title={Observability analysis of IMU intrinsic parameters in stereo visual--inertial odometry},author={Jung, Jae Hyung and Heo, Sejong and Park, Chan Gook},journal={IEEE Transactions on Instrumentation and Measurement},volume={69},number={10},pages={7530--7541},year={2020},publisher={IEEE},}
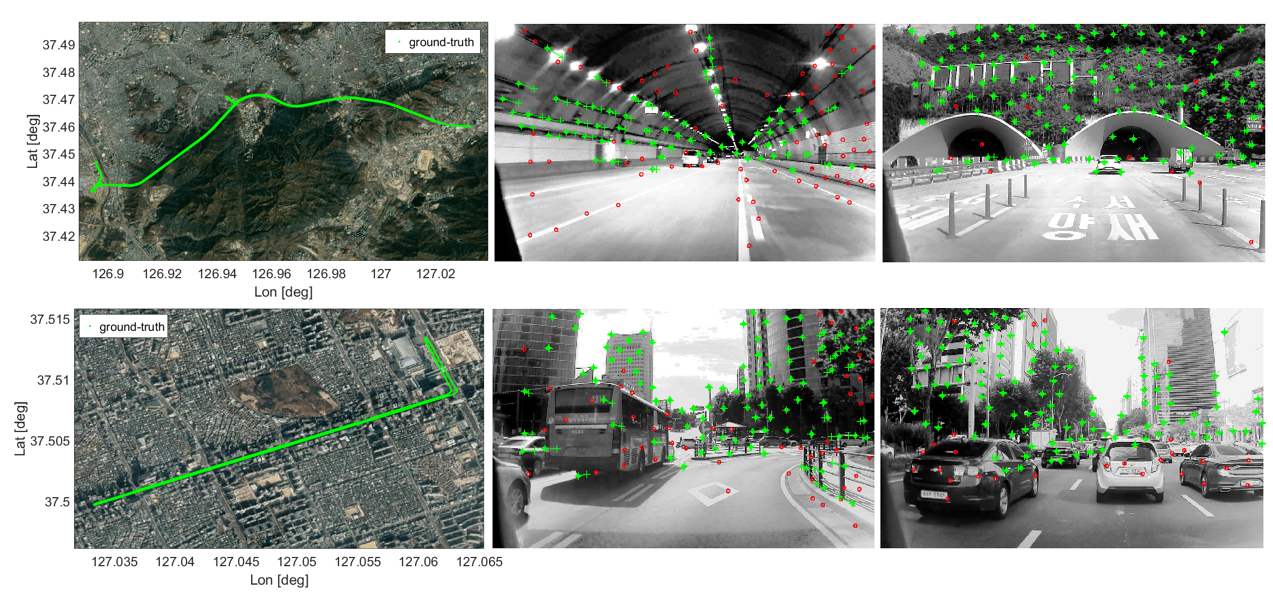
Monocular visual-inertial-wheel odometry using low-grade IMU in urban areas
Jae Hyung Jung, Jaehyuck Cha, Jae Young Chung, and 5 more authors
IEEE Transactions on Intelligent Transportation Systems, 2020
@article{jung2020monocular,title={Monocular visual-inertial-wheel odometry using low-grade IMU in urban areas},author={Jung, Jae Hyung and Cha, Jaehyuck and Chung, Jae Young and Kim, Tae Ihn and Seo, Myung Hwan and Park, Sang Yeon and Yeo, Jong Yun and Park, Chan Gook},journal={IEEE Transactions on Intelligent Transportation Systems},volume={23},number={2},pages={925--938},year={2020},publisher={IEEE},}
2019
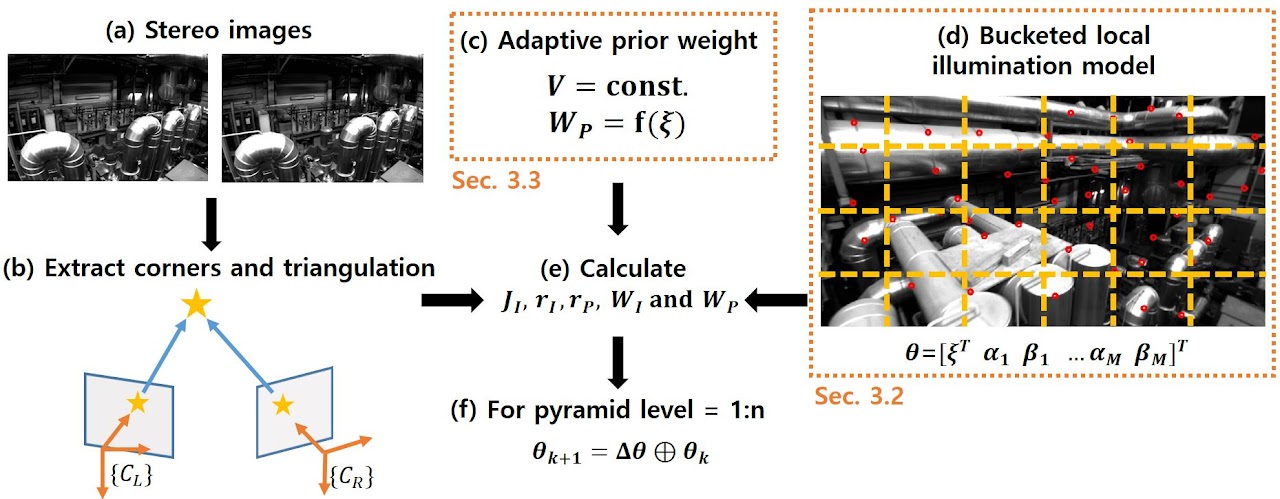
Patch-based stereo direct visual odometry robust to illumination changes
@article{jung2019patch,title={Patch-based stereo direct visual odometry robust to illumination changes},author={Jung, Jae Hyung and Heo, Sejong and Park, Chan Gook},journal={International Journal of Control, Automation and Systems},volume={17},number={3},pages={743--751},year={2019},publisher={Springer},}
2018
Consistent EKF-based visual-inertial navigation using points and lines
@article{heo2018consistent,title={Consistent EKF-based visual-inertial navigation using points and lines},author={Heo, Sejong and Jung, Jae Hyung and Park, Chan Gook},journal={IEEE Sensors Journal},volume={18},number={18},pages={7638--7649},year={2018},publisher={IEEE},}