Navigation system for Lunar rover
Visual-inertial navigation system for Lunar rover (2018)
For a future mission of Lunar surface exploration by a Korean rover, our team, Navigation and Electronic System LAB at Seoul National University, developed a visual-inertial navigation system that is based on the seminal work of Mourikis and Roumeliotis. This work was sponsored by the Ministry of Science and ICT, Republic of Korea.
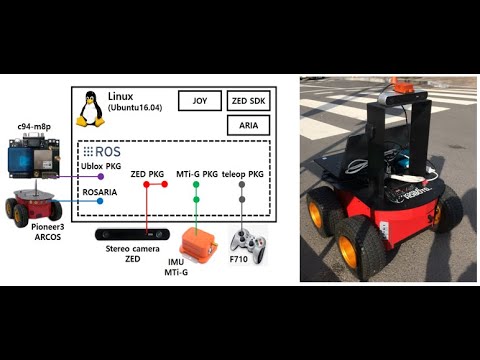
We tested our system in simulated environments, datasets collected by a MAV and a car. We also built a rover platform to gather stereo images, IMU readings, and RTK GPS module for the ground-truth for field testing.
🚀 Field test examples 🚀