Indoor personal navigation
Pedestrian dead reckoning and visual-inertial odometry fusion (2020)
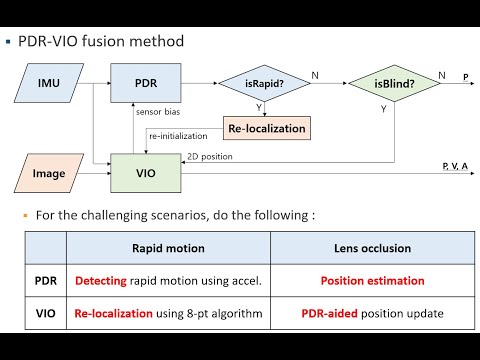
Fast motion and lens occlusion are challenging problems for a vision-based navigation system. We tackle this by fusing pedestrian dead reckoning (PDR) and visual-inertial odometry (VIO). PDR estimates sensor position by step detection and step length estimation only using measurements from an IMU.
This algorithm was developed by me and Dr. Soyoung Park and sponsored by Samsung Electronics through the Samsung Smart Campus Research Center.
🚀 Indoor test 🚀