Indoor and outdoor integrated navigation
Visual-inertial odometry for a quadruped robot (2022)
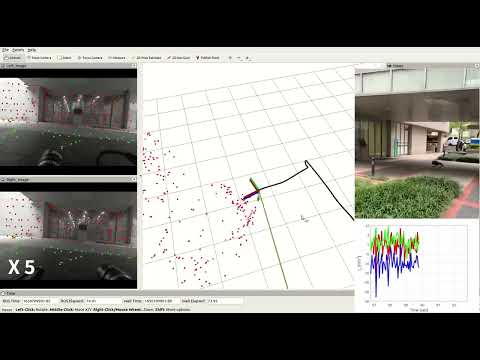
We showcase ensemble visual-inertial odometry (EnVIO) working on a quadruped robot. We saw a lot of challenges in this platform due to a sudden change in motion as indicated by the accelerometer measurements in the bottom right. We manually controlled the robot in a campus environment using off-the-shelf sensors.
The ground-truth position was marked by a laser tracker (Leica TS-16). We post-processed EnVIO in NUC i7 having CPU usages ~200% and ~40ms processing time per frame. In a total of 96.5m trajectory, EnVIO had 0.70m time RMSE.
🚀 Outdoor test 🚀